02 — Research
Research & publications
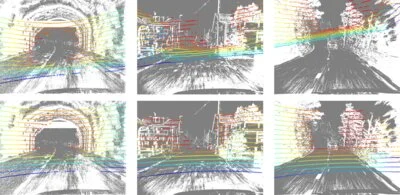
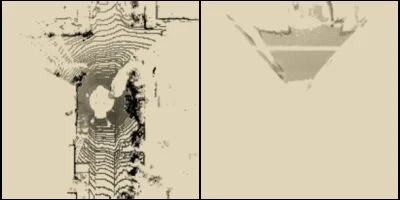
Deep learning approaches for robust multi-sensor calibration in autonomous driving — LiDAR–camera perception, uncertainty quantification, and online calibration.

WACV 2025
Uncertainty-Aware Online Extrinsic Calibration: A Conformal Prediction Approach
Novel uncertainty quantification for sensor calibration with reliability guarantees and improved odometry accuracy.
CVPR 2024 Workshop
MULi-Ev: Maintaining Unperturbed LiDAR-Event Calibration
First method for online calibration of LiDAR with event cameras.

arXiv 2023Patent
UniCal: A Single-Branch Transformer-Based Model for Camera-to-LiDAR Calibration
Efficient Transformer approach for calibration and validation, leading to an international patent.
BMVC 2023Oral
PseudoCal: Towards Initialization-Free Camera-LiDAR Calibration
First deep learning-based sensor calibration method without requiring manual initialization.

PhD Thesis 2025
Deep Learning for Multi-Sensor Calibration in Autonomous Driving
Novel deep learning approaches for robust multi-sensor calibration with uncertainty-aware methods.